热点资讯
其他资讯
建明镇直连式BH180A-L2-12-B1-D1-S7设备用行星变速箱
文章来源:ymcdkj
发布时间:2024-05-09 03:24:58
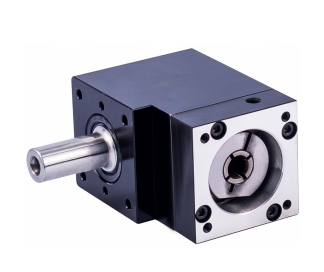
建明镇:直连式BH180A-L2-12-B1-D1-S7设备用行星变速箱
调整方法回座压力是通过调节圈来调整的,调节的原理是间隙原理,间隙越小,喷出时阻力越大,托住阀芯下降的力越大,越不易回座,反之,间隙越大,阀芯越容易回落,回座压力越高。对于只有下调节圈的安全阀,调节圈向上调,回座压力下降,调节圈向下调,回座压力升高;对于有上下调节圈的安全阀,上下调节圈的距离减小,回座压力降低,上下调节圈的距离增大,回座压力升高。校验方法及其优缺点安全阀校验有现场校验(在线校验)和校验台校验两种手段,条件允许下应该尽量在现场校验,因为现场校验更切合实际运行工况,因而更可靠。
行星减速机的专业术语
减速比:输入转速与输出转速之比。
级数:行星齿轮的套数。一般可以达到三级,效率会有所降低。
满载效率:在负载情况下(故障停止输出扭矩),减速机的传递效率。
工作寿命:行星减速机在额定负载下,额定输入转速时的累计工作时间。
额定扭矩:是额定寿命允许的长时间运转的扭矩。当输出转速为100转/分,减速机的寿命为平均寿命,超过此值时减速机的平均寿命会减少,当输出扭矩超过两倍时减速机故障。
噪音:单位分贝dB(A),此数值实在输入转速3000转/分,不带负载,距离减速机1米距离时测量值。
回差:将输入端固定,是输出端顺时针和逆时针方向旋转,当输出端承受正负2%额定扭矩时,减速机输出端由一个微小的角位移,此角位移即为回程间隙,也称“背隙”。单位是“分”,即一度的1/60。
行星减速机星形齿轮构造受力性解析
显式动力学有限元理论显式有限元算法的控制方程描述如下。
显式有限元程序采用Lagrange描述增量法,其相关方程如下
1)动量方程ij+fi=xi(1)式中,ij为柯西应力;为密度;fi为单位质量体积力;xi为加速度。
2)能量方程为E=Vsijij-(p+g)V(2)式中,V为现时构形体积;ij为应变率张量;q为体积黏性阻力;sij、p分别为偏应力与压力,sij=ij+(p+g)ij,p=-13ijij-q.
3)质量守恒方程为=J0(3)式中,J为雅可比行列式;0为初始质量密度。
4)其边界条件中面力边界条件情况如下ijni=ti(t)在S1面力边界上式中,ni(i=1,2,3)为现时构形边界S1的外法线方向余弦;ti(i=1,2,3)为面力载荷。位移边界条件xi(Xj,t)=Di(t)在S2上的边界条件式中,Xj(j=1,2,3)为初始位移;Di(t)(i=1,2,3)为给移函数。
滑动接触面间断处的跳跃条件为(+ij-ij)nj=0,当x+i=x-i接触时沿接触边界S0。行星减速机行星齿轮参数及材料属性行星齿轮结构各个齿轮的参数设置为:模数为4,压力角为20,齿宽为50mm,太阳轮、行星轮、内齿圈的齿数分别为:21、24、69.其中太阳轮行星轮的材料为Cr-Ni-Mo合金钢,其内齿圈采用42CrMo合金钢。
目前,由于高启动转矩、大转矩、低惯量的交、直流伺服电机在工业机器人中得到广泛的应用。其他电机,如交流伺服电机、步进电机根据不同的应用需求也会应用到工业机器人中。
特别是像机器人末端执行器(手爪)应采用体积、质量尽可能小的电机,尤其是要求快速响应时,伺服电机必须具有较高的可靠性,并且有较大的短时过载能力。具体使用要求:
快速性
启动转矩惯量比大
控制特性的连续性和直线性,随着控制信号的变化,电机的转速能连续变化,有时还需转速与控制信号成正比或近似成正比。
调速范围宽
体积小、质量小、轴向尺寸短
能经受得起苛刻的运行条件,可进行十分频繁的正反向和加减速运行,并能够在短时间内承受过载。