热点资讯
- 耐磨钢板切割厂家电话日照规格齐全的耐磨钢板厂家
- 2024淮南SPS6弹簧钢冲击功、SPS6品质保障##益锋钢材
- 苏州12cr1movG厂家直销12cr1movG圆钢锻件
- 安庆Q460方管厂 100x100x5方管 多少钱
- 江苏ac14钢现货
- 江苏34CrNiMob御钢出品
- 兴安现货0.4mm铝卷板-金晖公司
- 沧州11SMnPb37易车削钢光板、11SMnPb37加工性能】##恒鑫报价
- 郸城县镀锌钢管厂 郸城县镀锌钢管 郸城县镀锌管 郸城县螺旋钢管 #2024更新中
- 泰州泰兴市猪场空气过滤一体机 泰州泰兴市养猪场空气过滤一体机 送风机养殖
- 北京市昌平区回龙观街道槽钢 北京市昌平区回龙观街道槽钢厂家 北京市昌平区回龙观街道钢材市场
- 江苏20Cr25Ni20注重质量
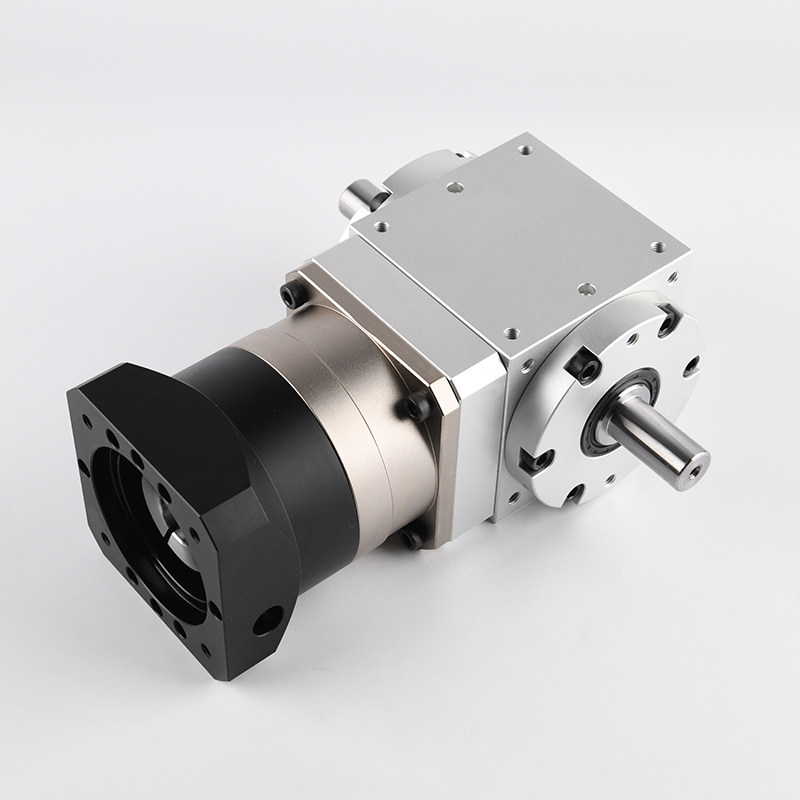
蛇窝泊镇新设备伊明牌ZPLE120-L2-35-S2-P2高转速伺服变速器
文章来源:ymcdkj
发布时间:2024-04-30 14:32:45
-S2-P2高转速伺服变速器
数控车床常用具及选择数控车床常用具在数控车床上使用的具有外圆车、钻头、镗、切断、螺纹具等,其中以外圆车、镗、钻头 为常用。数控车床使用的车、镗、切断、螺纹具均有焊接式和机夹式之分,除经济型数控车床外,目前已广泛使用机夹式车,它主要由体、片和片压紧系统三部分组成,如图所示,其中片普遍使用硬质合金涂层片。具选择在实际生产中,数控车主要根据数控车床回转架的具尺寸、工件材料、类型、要求及条件从具样本中查表确定,其步骤大致如下:确定工件材料和类型(外圆、孔或螺纹);根据粗、精要求和条件确定片的牌号和几何槽形;根据架尺寸、片类型和尺寸选择杆。
蛇窝泊镇 P2高转速伺服变速器
减速特性
1、高扭力、耐冲击:行星齿轮之机构形同于传统平行齿轮的传动方式。传统齿轮仅依靠两个齿轮间极少数点接触面挤压驱动,所有负荷集中于相接触之少数齿轮面,容易产生齿轮间摩擦与断裂。而行星齿轮减速机具有六个更大面积与齿轮接触面360度均匀负荷,多个齿轮面共同均匀承受瞬间冲击负荷,使其更能承受较高扭矩力之冲击,本体及各轴承零件也不会因高负荷而损坏破裂。
2、体积小、重力轻:传统齿轮减速机的设计皆有多组大小齿轮偏向交错传动减速,由于减速比须由两个齿轮数之倍数值产生,大小齿轮间更要有一定之间距咬合,因此齿箱容纳空间极大,尤其高速比的组合时更需要由两台以上减速齿箱连接组合,结构强度相对减弱,更使齿箱长度加长,造成体积与重量极为庞大。行星减速机的结构可依需求段数重复连接,单独完成多段组合,体积小,重量轻、外观轻巧,相形使设计更有价值感。
蛇窝泊镇新设备:伊明牌ZPLE120-L2-35-S2-P2高转速伺服变速器
为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。 在微分(D)控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。 自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。其原因是由于存在有较大惯性组件(环节)或有滞后(delay)组件,具有误差的作用, 其变化总是落后于误差的变化。解决的法是使误差的作用的变化“超前”,即在误差接近零时,误差的作用就应该是零。这就是说,在控制器中仅引入 “比例”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能 够提前使误差的控用等于零,甚至为负值,从而避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制器能改善系统在 调节过程中的动态特性。
直流电机以其价格低廉,控制方便的特性,得到了广泛的应用。旋转编码器精度高成本低,可作为的反馈传感器。采用PID闭环控制系统,可以并实时的控制和调整电机转速。
行星减速机的选型计算公式
例:被驱动设备所需功率为3KW,转速=360r/min,工作12小时/天。均匀负载启动次数少,求电机型号!
答:(一) 电机选型
1、 设选择电动机的转速为1450r/min,计算减速比
028≈4
2、减速机的级数为 (3-10)
3、减速机效率η为96%
4、均匀负载且在启动次数少的情况下可选f1=1.25
5、电机功率为p1n
p1n≥p1 × f1=p2 5KW
6、根据转速、功率确定电动机型号
(二) 减速机选型
1、计算被驱动设备的扭矩 T2
=79.58Nm
2、计算减速机输出扭矩T2N
T 75Nm
3、根据减速比、减速机输出扭矩、输入电机端尺寸、输出设备端尺寸选择合理的减速机。
蛇 S2-P2高转速伺服变速器
+
5-020-S2
5-020-S2
>
执手锁时要注意:如左右互换后,不能造成门时把手往上拎,因为目前市场上的中 执手锁都具有左右互换的功能,购执手锁时无须考虑门方向。执手锁和球形门锁时,要用原厂设计的一比一说明书。门锁之后,门油漆时,门锁务必卸下,以免外露件沾上油漆,因油漆时,必然会破坏锁的保护膜。施工期间,为保护门锁,包扎时绝不允许用胶纸包裹锁的外露件(包安括美纹纸),否则拆后一定会损害门锁表面的保护膜。